负载10kg
臂长1400mm
颜色蓝色
重量170kg
重复精度0.08mm
控制系统纳博特
轴数4轴
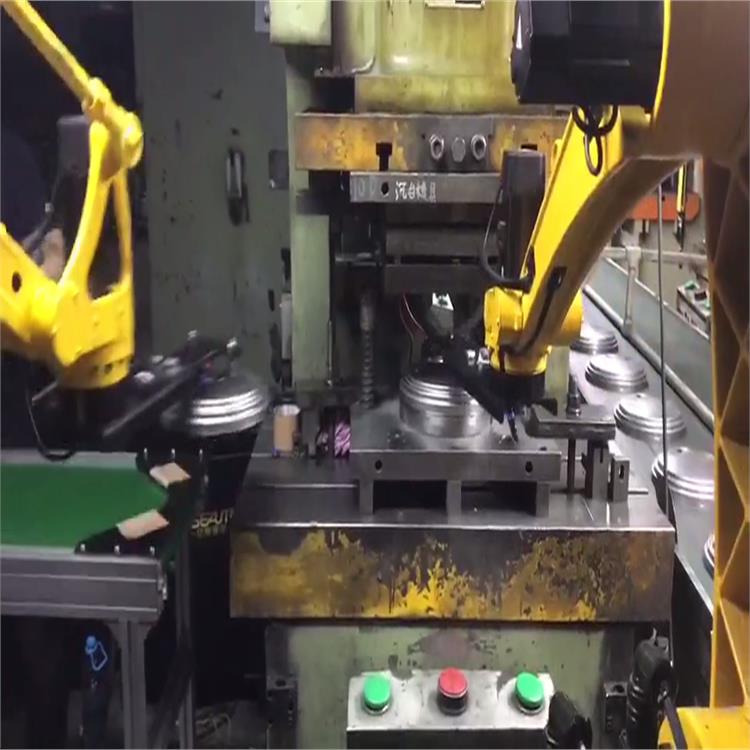
使用冲压机器人时,注意定期检查机械手运行是否有异常,是否有漏气以及相关部件松动的情况,若有此情况时需要及时到处理,确保冲压机器人整体运行稳定性。
四轴冲压机器人机械手每个关节的运动均由一台伺服电机和一台高精度谐波减速机共同实现,每个直线轴均由伺服电机和精密丝杠共同实现;同时配以的电器控制柜和示教盒,其性能优越、价格低廉、操作简便。能够随意连接油压机、齿轮冲床、气动冲床、攻牙机、铆钉机等,无论冲床吨位大小、机台高低、都可连接,实现设备自由组合、多角度实现各种复杂冲压动作、翻转、打废料、侧挂或斜放、堆料等,并适应连续模、单机多模的工艺要求等。预存100组产品工艺信息、方便转产。识别双料和冲床两次或多次冲压,保护工业机器人、冲床和模具的安全并能实现远程通讯。

冲压工业机器人也俗称:冲压机械手。用于冲压件的自动化搬运。目前,应用于冲压自动化生产线的冲压机械手主要有类:关节式冲压机械手、连杆式冲压机械手、摆臂冲压机械手。这三类冲压机械手因其各自的特点而应用于不同场合的冲压自动化生产。相较来说,各有其优点和不足。
关节式冲压机械手:自由度高、动作灵活、通用性强,但价格昂贵、使用操作技术要求较高。
连杆式冲压机械手:稳定、控制简单、成本较低,但灵活性和适用性较差,不易调整。
摆臂冲压机械手:融合了关节式机械手“高自由度”,以及连杆式机械手“稳定”的双重特性,价格适中、控制比较灵活、使用操作简单。不足的地方是,摆臂式的结构具有较大的转动惯量,一定程度地限制了机械手的运动速度和重复定位精度。

工业冲压机器人是如何识别物体进行抓取任务的呢
从机器视觉的角度,由简入繁从相机标定,平面物体检测、有纹理物体、无纹理物体、深度学习、与任务/运动规划结合等6个方面深度解析文章的标题。
先,我们要了解,机器人领域的视觉跟计算机领域的视觉有一些不同:机器视觉的目的是给机器人提供操作物体的信息。所以,机器视觉的研究大概有这几块:
1、物体识别:在图像中检测到物体类型等,这跟 CV 的研究有很大一部分交叉;
2、位姿估计:计算出物体在摄像机坐标系下的位置和姿态,对于机器人而言,需要抓取东西,不仅要知道这是什么,也需要知道它具体在哪里;
3、相机标定:因为上面做的只是计算了物体在相机坐标系下的坐标,我们还需要确定相机跟机器人的相对位置和姿态,这样才可以将物姿转换到机器人位姿。

四轴机器人产品特点:
1、冲压、液压自动化生产机器人;
2、四轴机构,灵活运动,适合多种工况;
3、伺服驱动,性能稳定,提高运行精度;
4、配套客户现**床,实现自动冲压;
5、操作简便,界面友好,方便员工学习。
冲压机械手,顾名思义,就要像人手一样即体现个体的灵活,又要能和帮手形成合力,完成冲压线的无人化作业,就是这样的手,才能交出冲压无人化的钥匙。而机器人单臂冲压机械手就是这样的手——轻松抓起、自在放下、随意连接、自由组合。
http://kestarobot.cn.b2b168.com