负载10kg
臂长1400mm
颜色蓝色
重量170kg
重复精度0.08mm
控制系统纳博特
轴数4轴
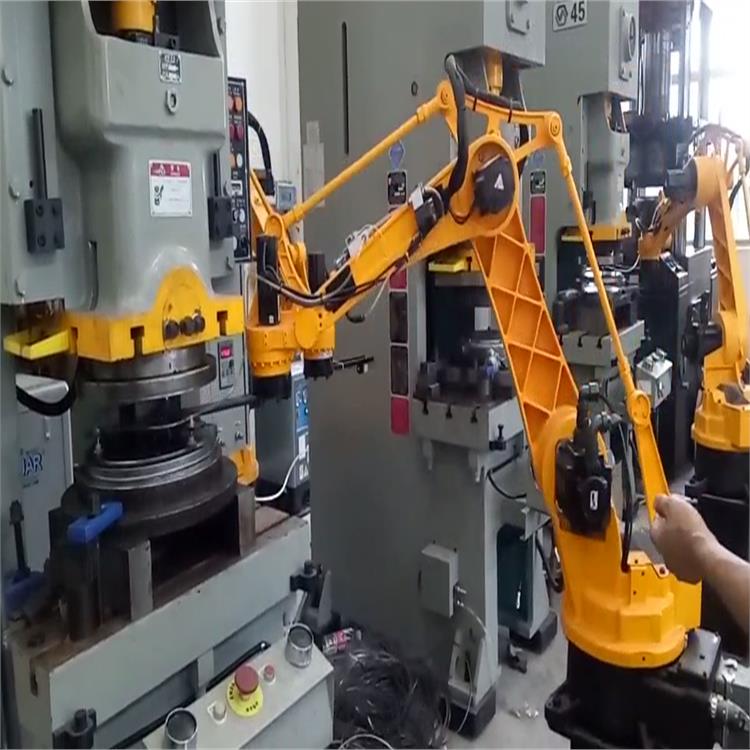
四轴机器人作用:四轴冲压机械手可以将多套模具安装在统一台冲床上生产主动化生产,削减冲床投资,四轴冲压机械手削减了延续冲压的模具投资与高速冲床的投资,以通俗的设备与模具实现主动化延续生产,适合产品拉伸生产,如高压锅、水杯、滤清器等产品,变换机种时仅须简单调试即可。
自动冲压机器人的工作空间是怎样的呢
1、通常冲压冲压机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,冲压机器人实际所能达到的工作空间。
2、冲压冲压机器人说明书上提供的工作空间往往要小于运动学意义上的空间。这是因为在可达空间中,手臂位置不同时有效负载、允许达到的速度和加速度都不一样,在臂杆位置允许的限值通常要比其他位置的小些。此外,在可达空间边界上可能存在自由度退化的问题,此时的位置称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度退化现象,这部分工作空间在冲压机器人工作时都不能被利用。
3、除了在工作空间边缘,实际应用中的冲压机械手还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。

四轴冲压机器人机械手每个关节的运动均由一台伺服电机和一台高精度谐波减速机共同实现,每个直线轴均由伺服电机和精密丝杠共同实现;同时配以的电器控制柜和示教盒,其性能优越、价格低廉、操作简便。能够随意连接油压机、齿轮冲床、气动冲床、攻牙机、铆钉机等,无论冲床吨位大小、机台高低、都可连接,实现设备自由组合、多角度实现各种复杂冲压动作、翻转、打废料、侧挂或斜放、堆料等,并适应连续模、单机多模的工艺要求等。预存100组产品工艺信息、方便转产。识别双料和冲床两次或多次冲压,保护工业机器人、冲床和模具的安全并能实现远程通讯。

冲压机器人日常如何维护保养呢
1、检查同步带、校正盘、同步轮:给设备通电,用适当的力气转动校正盘,能自动弹回原位时为正常;
2、检查吸盘、接头、吸盘固定螺丝:查看吸盘固定处有无脱落、破损现象,接头是否松动,吸盘紧固螺丝是否松动;
3、检查触摸屏、开关、急停按钮:目测触摸屏屏幕是否有破损,点击触摸看是否灵敏,打开开关看设备是否正常通电,按下急停按钮看设备是否能紧急停止;
4、检查拖链、波纹管:晃动波纹管看凹陷处是否破损,连接是否牢靠,前后移动手臂,看拖链移动是否正常,连接处有无破损;
5、检查接地:检测机台内的地线端子是否和公用地线接通;
6、检查各电器元件:通电后检查电控柜内各电气元件运行指示灯是否正常,安装及各线路接点是否牢靠,查看电气原件是否有烧焦现象,运行时是否会发出噪声;
7、手臂、立臂、台面及护罩的清洁:每周清理一次手臂、立臂、台面上的灰尘,并用酒精擦拭手臂、立臂及护罩;
8、检查手臂、立臂外罩紧固螺丝是否松动:用工具将手臂、立臂外罩的紧固螺丝是否松动,若有则重新紧固一遍;
9、检查机台的安装位置及水平度:目测机台脚柱相对于地面有无偏移,用水平仪测量机台的水平度。

冲压工业机器人也俗称:冲压机械手。用于冲压件的自动化搬运。目前,应用于冲压自动化生产线的冲压机械手主要有类:关节式冲压机械手、连杆式冲压机械手、摆臂冲压机械手。这三类冲压机械手因其各自的特点而应用于不同场合的冲压自动化生产。相较来说,各有其优点和不足。
关节式冲压机械手:自由度高、动作灵活、通用性强,但价格昂贵、使用操作技术要求较高。
连杆式冲压机械手:稳定、控制简单、成本较低,但灵活性和适用性较差,不易调整。
摆臂冲压机械手:融合了关节式机械手“高自由度”,以及连杆式机械手“稳定”的双重特性,价格适中、控制比较灵活、使用操作简单。不足的地方是,摆臂式的结构具有较大的转动惯量,一定程度地限制了机械手的运动速度和重复定位精度。
我们公司依托在机器人自动化领域的经验和优势,重点突破生产自动化、工业机器人的系统集成、研发和生产,为用户提供完整的系统解决方案。广泛服务于汽车、摩托车、自行车、金属家具、健身器材等行业。
http://kestarobot.cn.b2b168.com