负载10kg
臂长1400mm
颜色蓝色
重量170kg
重复精度0.08mm
控制系统纳博特
轴数4轴
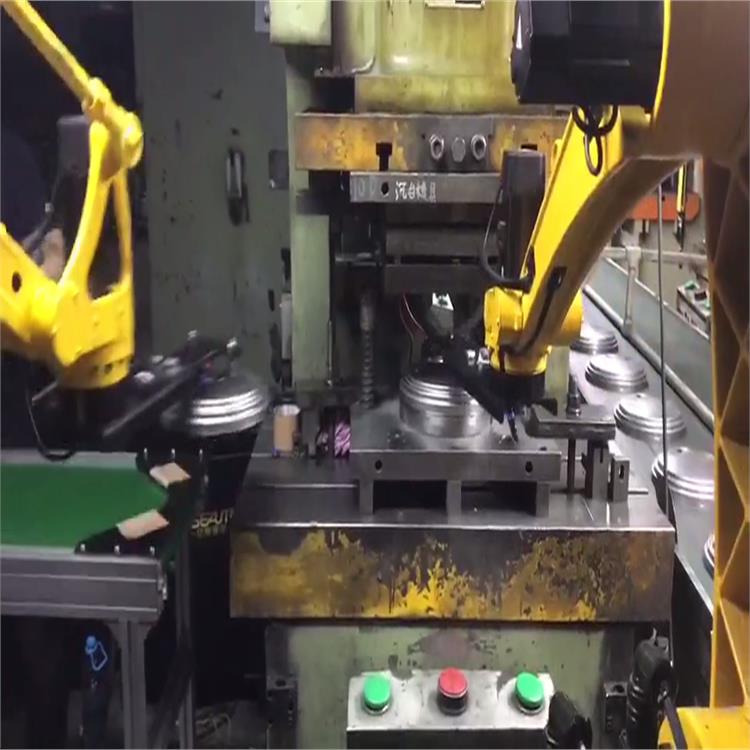
冲压机器人的特优势
1、成本低,半年可退货:一个机械手约6万-10万根,轴数不一样,不同会影响价格。前期会花费很多钱,但按时间和月份计算,相当于半年的工资。
2、没有报酬:当然冲压机器人是没有报酬的,而且操作效率非常高,相比人工的错误率要低得多。减少工人对手工技能的依赖。在中国,一般工人的比例非常高,工人对手工技术的依赖性也非常大。社会需要进步,制造业须继续科学。冲压机器人取代体力劳动也将减少工人对体力技术的依赖。
3、可替代人工危险操作:在一些冲压领域,很多工序都是非常危险的。冲压行业的原理是用冲床的重量来生产,手工操作是非常危险的。冲压机器人的使用可以消除企业老板的顾虑。否则赔偿费用为30 -40万元。
4、工作时间长:可连续作业,且劳动须有休息时间。
冲压机器人的有效负载指的是什么
冲压机器人的有效负载是指冲压机械手在工作时臂端可能搬运的物体重量或所能承受的力或力矩,用以表示机械手的负荷能力。
机械手在不同位置时,允许的可搬运重量是不同的,因此冲压机械手的额定可搬运重量是指其臂杆在工作空间中任意位置时端部都能搬运的重量。

冲压机器人的动态特性是怎样的呢
冲压机器人结构动态参数主要包括质量、惯性矩、刚度、阻尼系数、固有频率和振动模态。
设计时应该尽量减小质量和惯量。对于冲压机器人的刚度,若刚度差,机械手的位置精度和系统固有频率将下降,从而导致系统动态不稳定;但对于某些作业,适当地增加柔顺性是有利的,理想的情况是希望机械手臂杆的刚度可调。增加系统的阻尼对于缩短振荡的衰减时间、提高系统的动态稳定性是有利的。提高系统的固有频率,避开工作频率范围,也有利于提高系统的稳定性。

冲压工业机器人也俗称:冲压机械手。用于冲压件的自动化搬运。目前,应用于冲压自动化生产线的冲压机械手主要有类:关节式冲压机械手、连杆式冲压机械手、摆臂冲压机械手。这三类冲压机械手因其各自的特点而应用于不同场合的冲压自动化生产。相较来说,各有其优点和不足。
关节式冲压机械手:自由度高、动作灵活、通用性强,但价格昂贵、使用操作技术要求较高。
连杆式冲压机械手:稳定、控制简单、成本较低,但灵活性和适用性较差,不易调整。
摆臂冲压机械手:融合了关节式机械手“高自由度”,以及连杆式机械手“稳定”的双重特性,价格适中、控制比较灵活、使用操作简单。不足的地方是,摆臂式的结构具有较大的转动惯量,一定程度地限制了机械手的运动速度和重复定位精度。

自动冲压机器人的工作空间是怎样的呢
1、通常冲压冲压机器人说明书中表示的工作空间指的是手腕上机械接口坐标系的原点在空间能达到的范围,也即手腕端部法兰的中心点在空间所能到达的范围,而不是末端执行器端点所能达到的范围。因此,在设计和选用时,要注意安装末端执行器后,冲压机器人实际所能达到的工作空间。
2、冲压冲压机器人说明书上提供的工作空间往往要小于运动学意义上的空间。这是因为在可达空间中,手臂位置不同时有效负载、允许达到的速度和加速度都不一样,在臂杆位置允许的限值通常要比其他位置的小些。此外,在可达空间边界上可能存在自由度退化的问题,此时的位置称为奇异位形,而且在奇异位形周围相当大的范围内都会出现自由度退化现象,这部分工作空间在冲压机器人工作时都不能被利用。
3、除了在工作空间边缘,实际应用中的冲压机械手还可能由于受到机械结构的限制,在工作空间的内部也存在着臂端不能达到的区域,这就是常说的空洞或空腔。空腔是指在工作空间内臂端不能达到的完全封闭空间。而空洞是指在沿转轴周围全长上臂端都不能达到的空间。
我们公司依托在机器人自动化领域的经验和优势,重点突破生产自动化、工业机器人的系统集成、研发和生产,为用户提供完整的系统解决方案。广泛服务于汽车、摩托车、自行车、金属家具、健身器材等行业。
http://kestarobot.cn.b2b168.com